



GNSS吊荷位置誘導システム G-クレーン
|
|||||

| システム概要 | |
| 従来法との比較 | |
設計座標ごとに吊荷の最終位置を記録し、出来形管理を行う
|
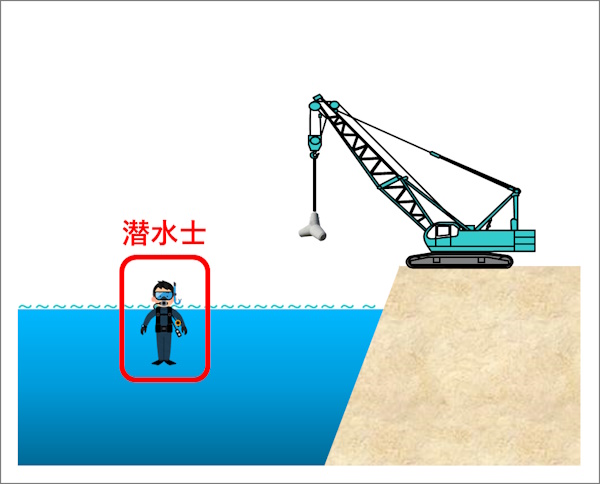
▶ 従来法との比較 |
|
| 従来法 測量機で水中の座標計測が出来ない為、潜水士の手配をしないといけない。 潜水士の誘導によって作業するため位置決めに時間がかかる。 |
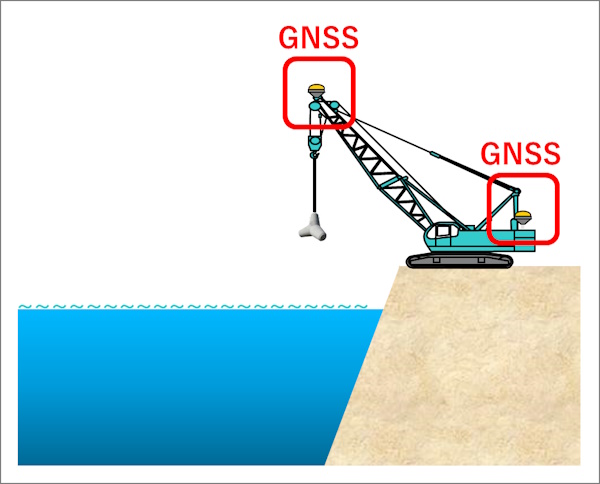
システム導入後 GNSSアンテナよりオフセット計算を行いクレーン先端の位置情報を取得。 潜水士による誘導が不要となる為、作業効率が大幅に向上。 |
 |
 |
| 機器構成 | |
| システム機器構成① | システム機器構成② | |
|
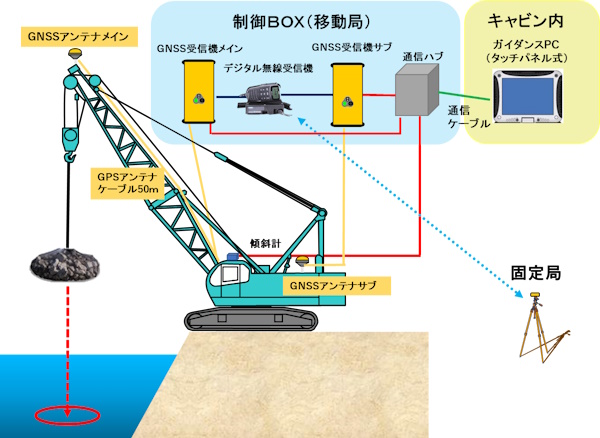
▶ システム機器構成① |
| アーム先端に主となるGNSSアンテナ、重機本体に誘導方向や姿勢補正のためのGNSSアンテナ・傾斜計・制御ボックス・ガイダンスPC等を設置します。 制御ボックス内のデジタル無線機で固定局からの補正情報を受信します。 |
 |
|
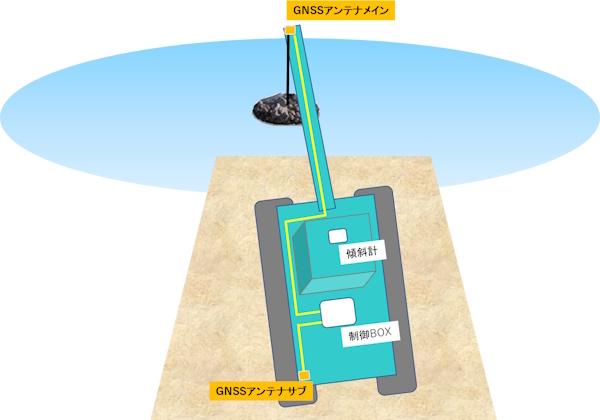
▶ システム機器構成② |
| アーム先端のGNSSアンテナ・重機本体のGNSSアンテナの座標と傾斜計の角度から吊荷の位置を計算します。 ※吊荷が鉛直下にあるものとする。風や振動による揺れによるずれは考慮しない。 |
 |
| システム画面 | |
| 誘導システム画面 | 目標(設計)座標の設定 | |
|
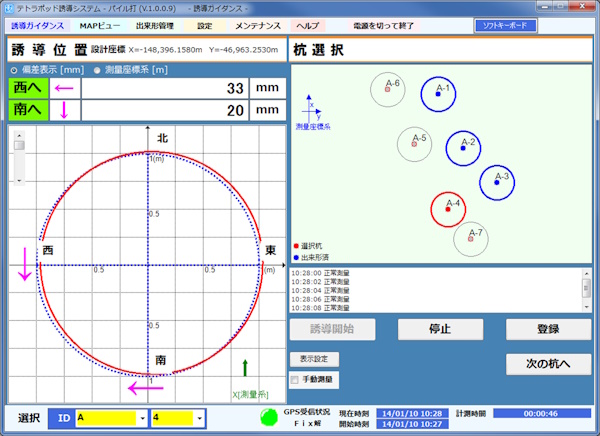
▶ 誘導システム画面 |
| 誘導する座標名を選択し、画面左の赤丸と青丸が重なるように吊荷を操作します。 画面右のミニマップで誘導中(赤)、施工済(青)、未施工(灰)で選択中の座標周辺の施工状況が確認できます。 |
 |
|
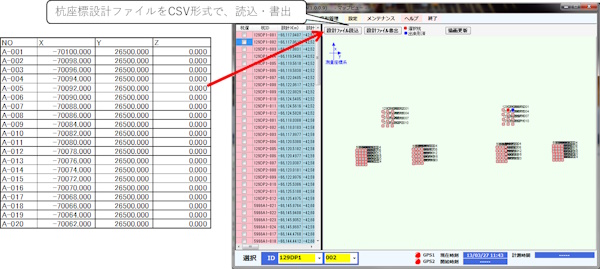
▶ 目標(設計)座標の設定 |
| 目標(設計)座標の設定はシステム上で直接編集するほか、CSVファイルでの入出力が可能です。 |
 |
| 出来形データ | |
| 出来形管理画面 | |
|
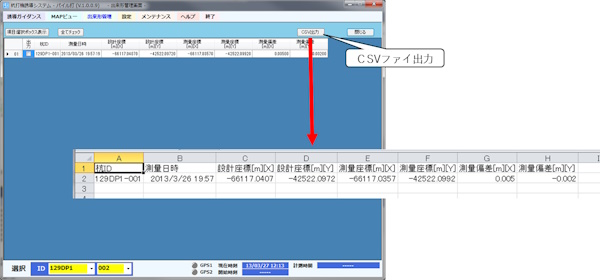
▶ 出来形管理画面 |
| システム誘導画面で、登録されたデータは、出来形データとして記録され、csv出力が出来ます。 |
 |


